Physics Undergrad Showcase – April 27th, 12-2pm

The William & Mary Racing team brought home the 1st place trophy in the American Society of Naval Engineers’ autonomous race division of the Promoting Electric Propulsion event.

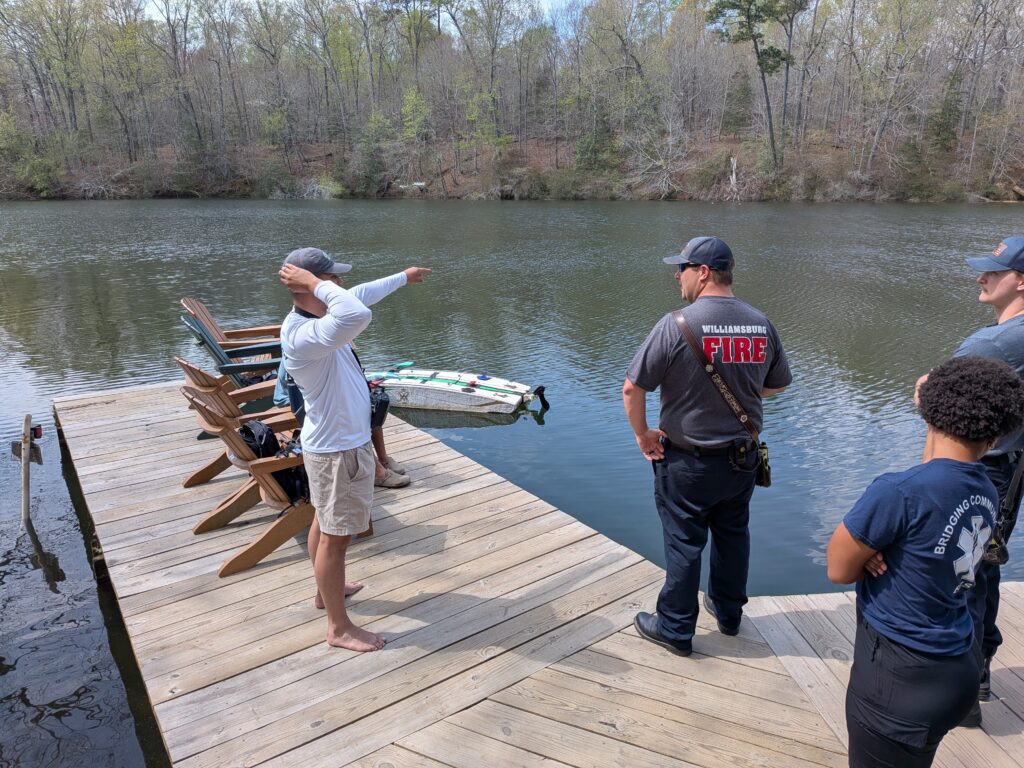
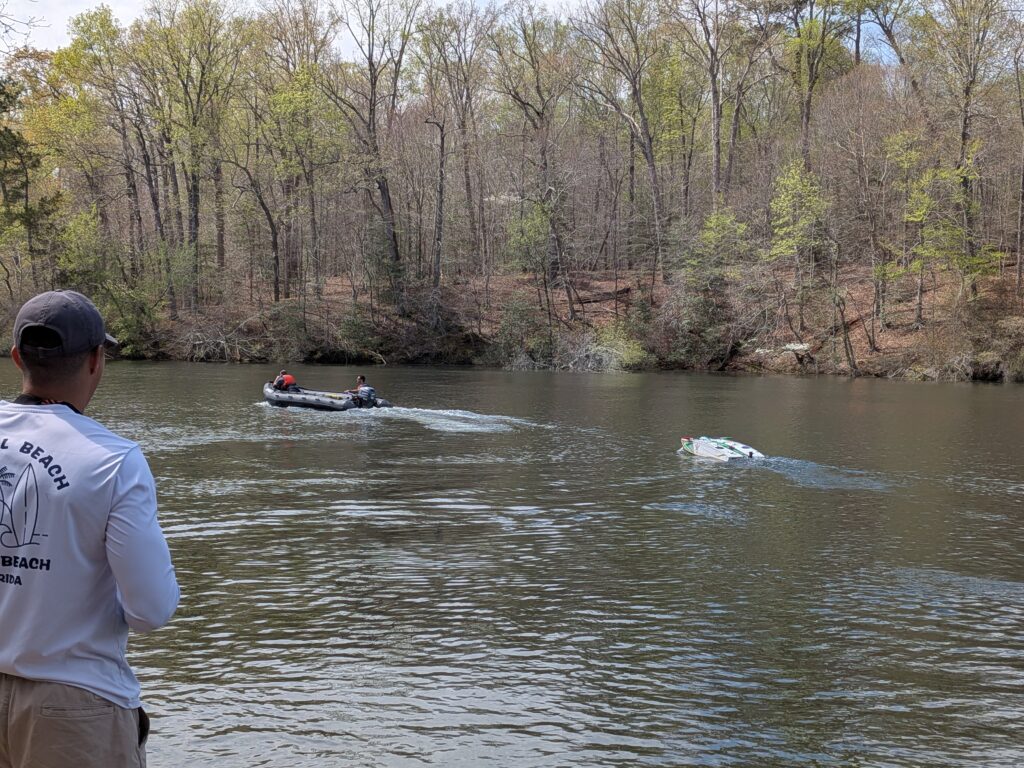
A concerned citizen driving by Lake Matoaka on campus here at William & Mary saw an unidentified object floating in the lake. Assuming it was an over-turned boater in trouble they called 911 and Williamsburg’s finest, the Fire & Police departments, showed up in mere moments ready to perform a search and rescue on the lake.
Thankfully, all they found was the diligent W&M students working on their autonomous electric race boat. So a pivot was made and the WFD had an opportunity to perform an impromptu team rescue training simulation as well as to go toe-to-toe on the water with the Tribe.
To all those involved, thank you. The response by WFD and WPD was impressive! Even you, concerned citizen, thanks for taking the time to be concerned; it takes a Tribe.

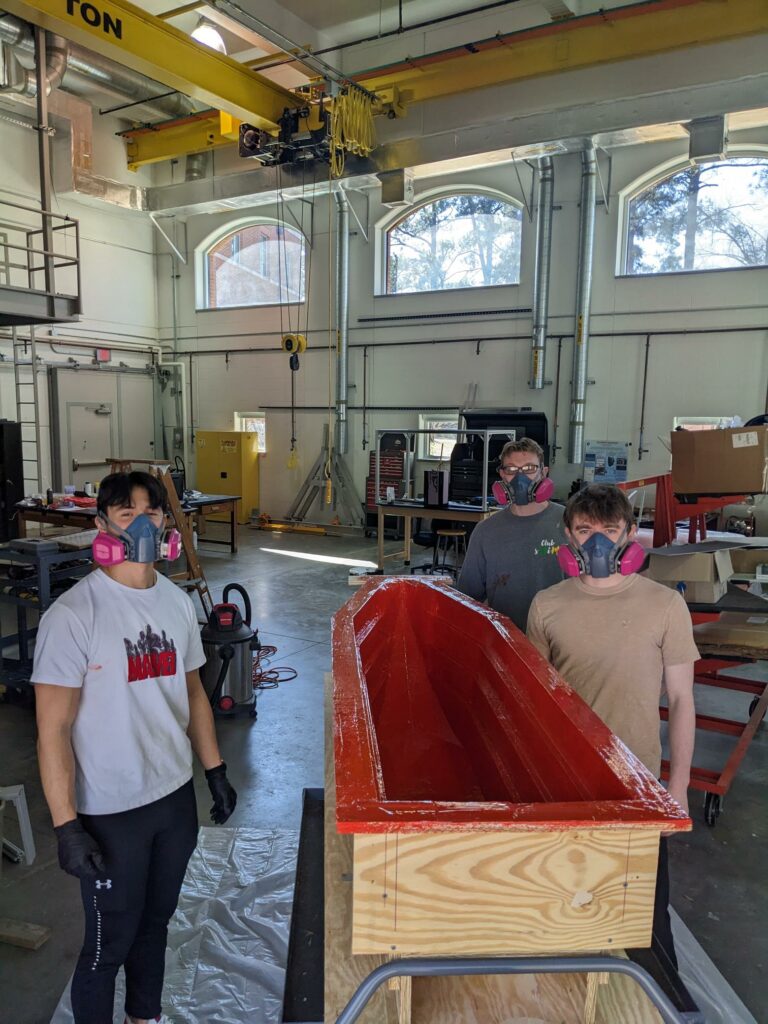
The Makerspaces at William & Mary are now open in our new ISC4 location (0302). While there’s still a lot of work to do in order to finish getting all of the equipment online and ready to support the Tribe ecosystem, the primary design studio is now setup and ready to go.
Among the features of the new location are an assortment of co-located production spaces; these include the primary design studio, the laser lab, hot work lab, hard materials processing (metal shop), and soft materials processing (wood shop & plastics) spaces. Additionally, there is the electronics & additive manufacturing lab including a new Metal X metal 3D printing line, as well as a walk-in spray booth and finishing room for coatings, composite layups, and more.
We’re excited to continue bringing these spaces online! Check the hours of operation and stop by for a tour or to make something.




Spaces not shown: Laser Lab, Hot Work Room, Hard & Soft Materials Processing Labs, Spray & Finishing Room, and Additive / Electronics Lab Interior.
This summer the Makerspaces were being utilized and the Tribe was building, innovating, and creating great things. Some items being worked on in the Makerspaces included a synthetic gut-analog system to provide a test-bed for various biology tasks by the iGEM team, an all carbon autonomous race boat for this years’ electric USV race team, a water sensor to monitor re-forestation in remote parts of the world, and more. While the summer was great, it’s even better to have all the students and faculty back on campus working together, learning together, and building great things.
We’re looking forward to an excellent year, the coming completion of the ISC4 Makerspace complex in ’25, many advanced STEM and EPAD capstone activities, and so much more. We hope that you’re excited too.
We’re open and it’s time to build!
Stay tuned to our calendar, website, and web portal for trainings, workshops, and more.


We hope you all had a great summer! We sure did. Between winning 3rd place in the unmanned division of the Society of Naval Engineers’ electric propulsion competition, successfully sending students to Madagascar to deploy low cost water sensors in the field, working on an in-flight autonomous air sampling payload for UAVs, adding in a component to the engineering design course around building ‘smart devices’ and tackling some advanced materials science research; we’ve been super busy ourselves. That said, we are super excited for the semester to begin on Wednesday!
The Makerspaces at William & Mary will open for all on Wednesday, August 30th, alongside the start of classes. Please check the calendar for hours & upcoming events and stay tuned for new developments.
As for tool changes & modifications; all systems are up and running including the 3 lasers, 20 printers, CNC router, mill & lathe, sewing and much more. Added to this, we are currently facilitizing a 4’x3′ CNC plasma cutter for use and have fine tuned some procedures around the fiber based laser engraver.
Most importantly; WE ARE HIRING! If you’re interested please apply ASAP through the “About” tab on this page.
Alright, time to build things and in so doing, build ourselves. Time for the 23-24 academic year to begin! WOOHOO!

First year entry & 3rd place finisher in the unmanned division of Society of Naval Engineers’ electric propulsion competition.

On the water

Woohoo! Go TRIBE!
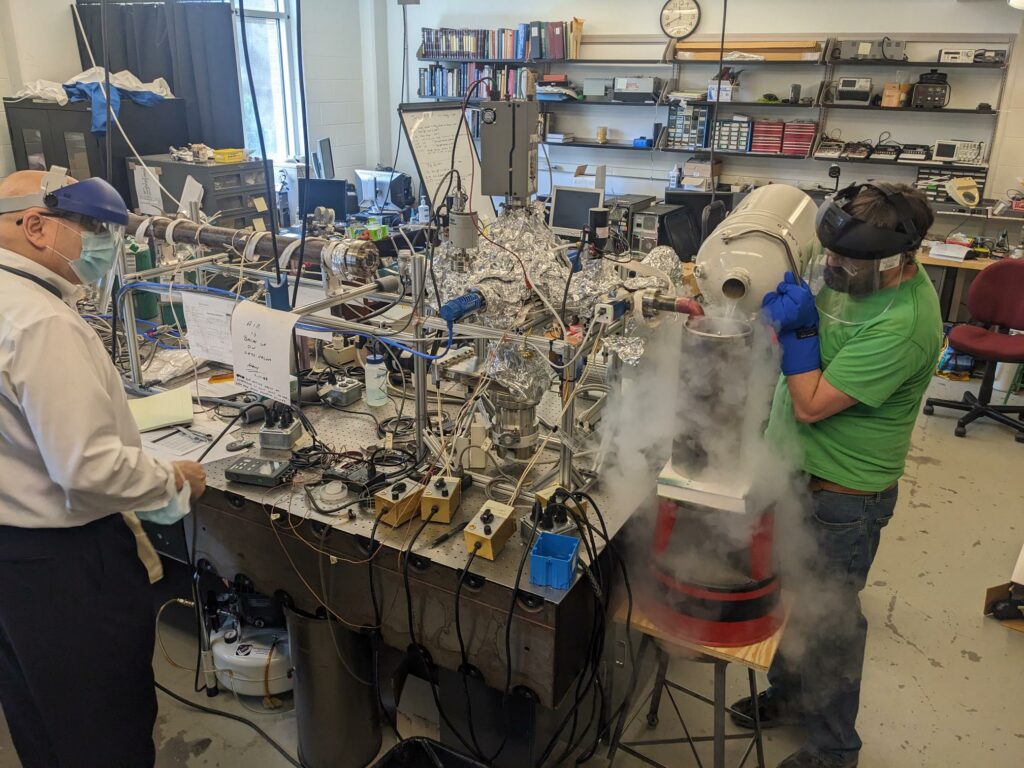
Some super advanced material science research underway in an Engineering, Physics & Applied Design Lab in the basement of Small Hall. (Yes, that is our VPR at left, still hands-on in some world class research!)
In Madagascar, 2 students from William & Mary (left), and their partner from Antanarivo, on a remote chat about technology.
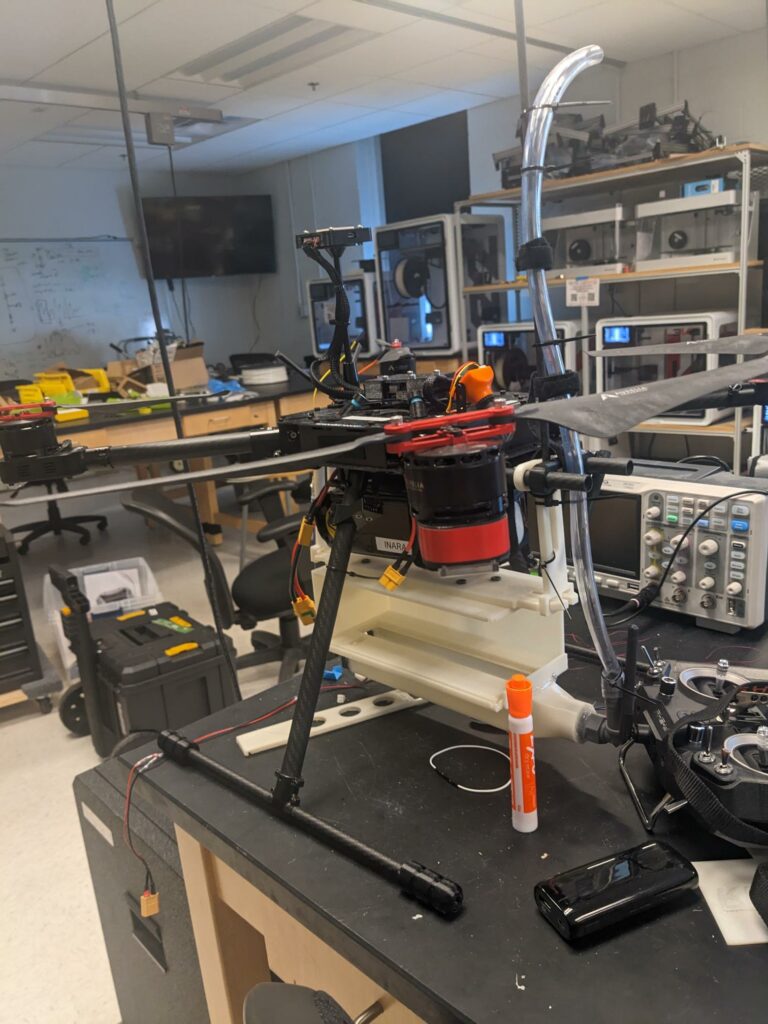
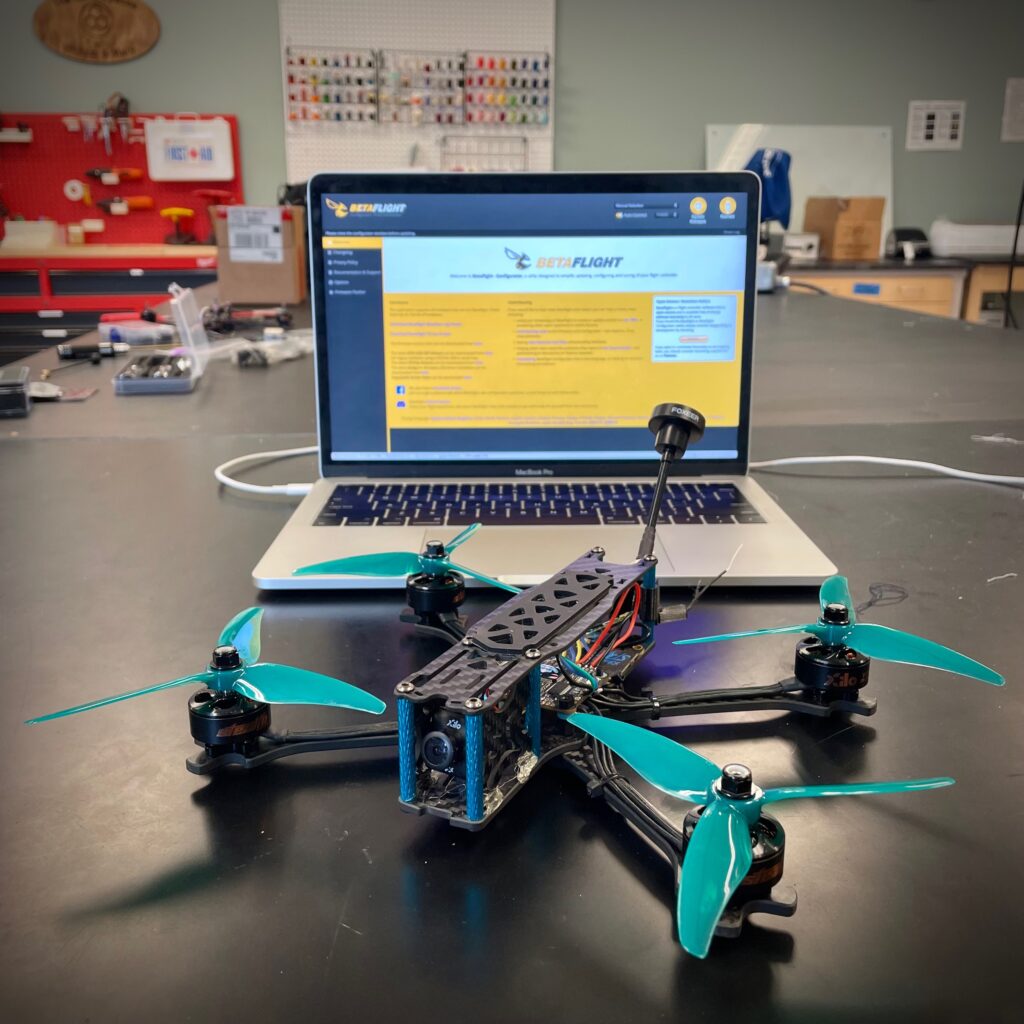
Air sampling payload for autonomous UAV data collection.
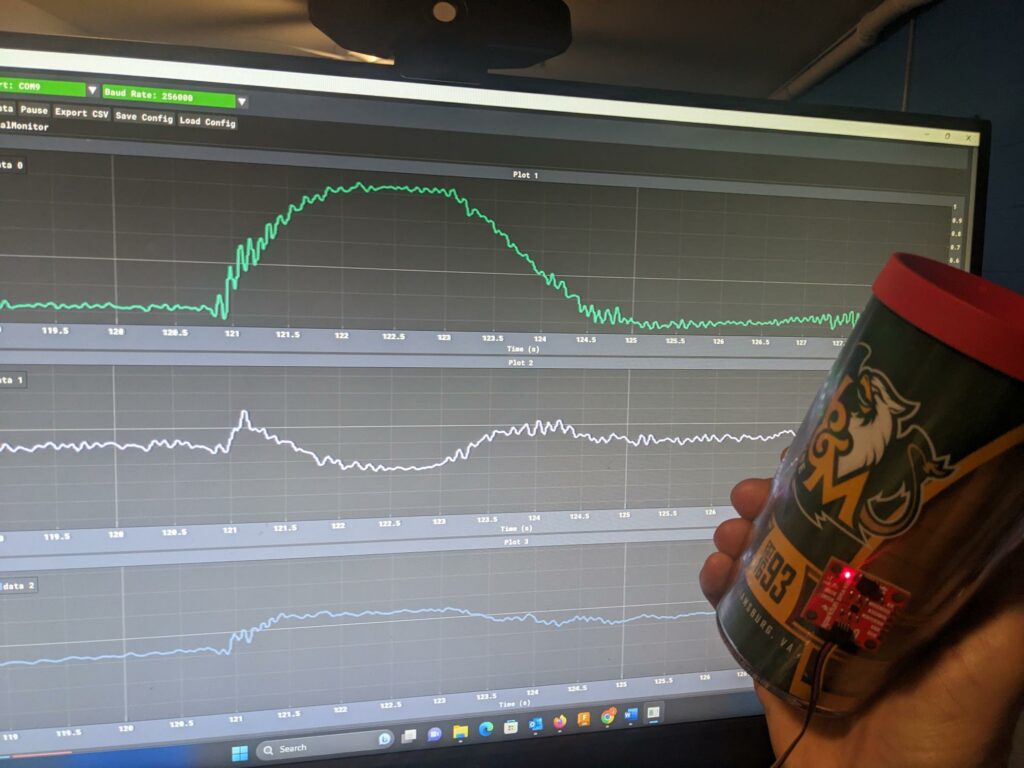
Working on a new course module for students to gain intuition about data in ‘Smart’ devices in APSC251 Intro to Engineering Design.
This Friday | CGA Speaker Series | Kayla Flamm, GIS Specialist | March 31st, 1pmThe CGA Speaker Series continues with a talk from Missouri Botanical Garden’s GIS Specialist, Kayla Flamm! Kayla has over 8 years of experience in applying geospatial technology to support the Missouri Botanical Garden’s work in managing an extensive living plant collection and conducting field work in support of conservation horticulture. She has a B.A. in Geography with an emphasis in biogeography and GIS from the University of Missouri. Join us for Kayla’s talk: Supporting a Botanical Garden from the Sky: A Drone’s Eye View of Plant Conservation on Friday, March 31st at 1:00 PM via Zoom.

The spring semester has moved so quickly and it’s almost spring break! There has been a lot of activities going on in the Makerspaces at WIlliam & Mary ranging from sewing corsets to building an autonomous race boat. As we approach spring break there are two items we want to highlight:
1. We will be closed during spring break.
2. The 3D scanning studio is now setup and operational behind the Swem Library makerspace location! Ask an MSE for details.
We hope everyone has a safe and restful break, and we’ll see you for some more awesome in the second half of the semester!

It has been quite the semester here in The Makerspaces. If you’ve been around, you’ve seen countless things get created, from the recent architectural adventures to working on concepts in autonomous boats, classwork involving 3D printed water pumps, custom solutions for research tools like the X-Ray Photoelectron Spectroscopy system at the Applied Research Center, working on setting up a 3D scanning lab, and hosting a sUAS pilot to discuss her roles at NASA.
There’s never a dull moment around here. As we head into the winter break you’ll still see some Makerspaces activity on campus, however, it is likely to be focused on maintenance & repair as well as gearing up for the spring semester.
After December 9th, feel free to stop by to make something by appointment only and with limited staff, additionally, stay tuned for the spring semester opening of our 3D scanning lab located adjacent-behind The Makerspaces at Swem Library wherein we’ll have multiple 3D scanning options for both small and large scales.
Good luck on Finals and we hope you have a wonderful holiday season and winter break! See you in the spring!