The Makerspaces at William & Mary are now open in our new ISC4 location (0302). While there’s still a lot of work to do in order to finish getting all of the equipment online and ready to support the Tribe ecosystem, the primary design studio is now setup and ready to go.
Among the features of the new location are an assortment of co-located production spaces; these include the primary design studio, the laser lab, hot work lab, hard materials processing (metal shop), and soft materials processing (wood shop & plastics) spaces. Additionally, there is the electronics & additive manufacturing lab including a new Metal X metal 3D printing line, as well as a walk-in spray booth and finishing room for coatings, composite layups, and more.
We’re excited to continue bringing these spaces online! Check the hours of operation and stop by for a tour or to make something.
Spaces not shown: Laser Lab, Hot Work Room, Hard & Soft Materials Processing Labs, Spray & Finishing Room, and Additive / Electronics Lab Interior.
We hope you all had a great summer! We sure did. Between winning 3rd place in the unmanned division of the Society of Naval Engineers’ electric propulsion competition, successfully sending students to Madagascar to deploy low cost water sensors in the field, working on an in-flight autonomous air sampling payload for UAVs, adding in a component to the engineering design course around building ‘smart devices’ and tackling some advanced materials science research; we’ve been super busy ourselves. That said, we are super excited for the semester to begin on Wednesday!
The Makerspaces at William & Mary will open for all on Wednesday, August 30th, alongside the start of classes. Please check the calendar for hours & upcoming events and stay tuned for new developments.
As for tool changes & modifications; all systems are up and running including the 3 lasers, 20 printers, CNC router, mill & lathe, sewing and much more. Added to this, we are currently facilitizing a 4’x3′ CNC plasma cutter for use and have fine tuned some procedures around the fiber based laser engraver.
Most importantly; WE ARE HIRING! If you’re interested please apply ASAP through the “About” tab on this page.
Alright, time to build things and in so doing, build ourselves. Time for the 23-24 academic year to begin! WOOHOO!
First year entry & 3rd place finisher in the unmanned division of Society of Naval Engineers’ electric propulsion competition.
On the water
Woohoo! Go TRIBE!
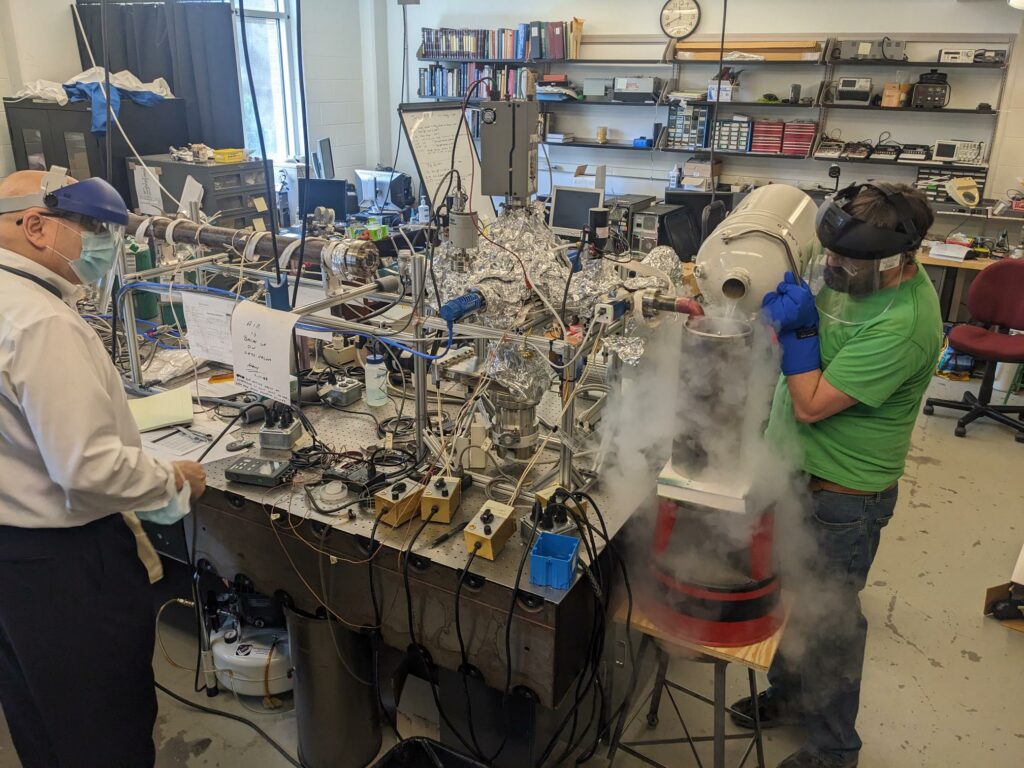
Some super advanced material science research underway in an Engineering, Physics & Applied Design Lab in the basement of Small Hall. (Yes, that is our VPR at left, still hands-on in some world class research!)
In Madagascar, 2 students from William & Mary (left), and their partner from Antanarivo, on a remote chat about technology.
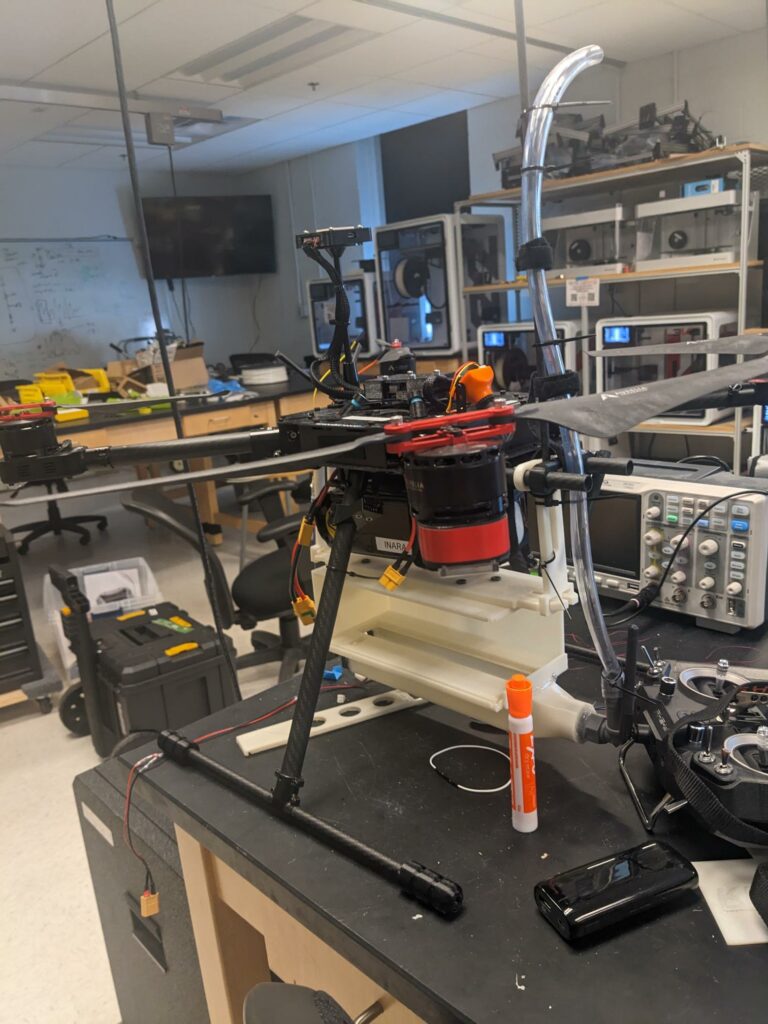
Air sampling payload for autonomous UAV data collection.
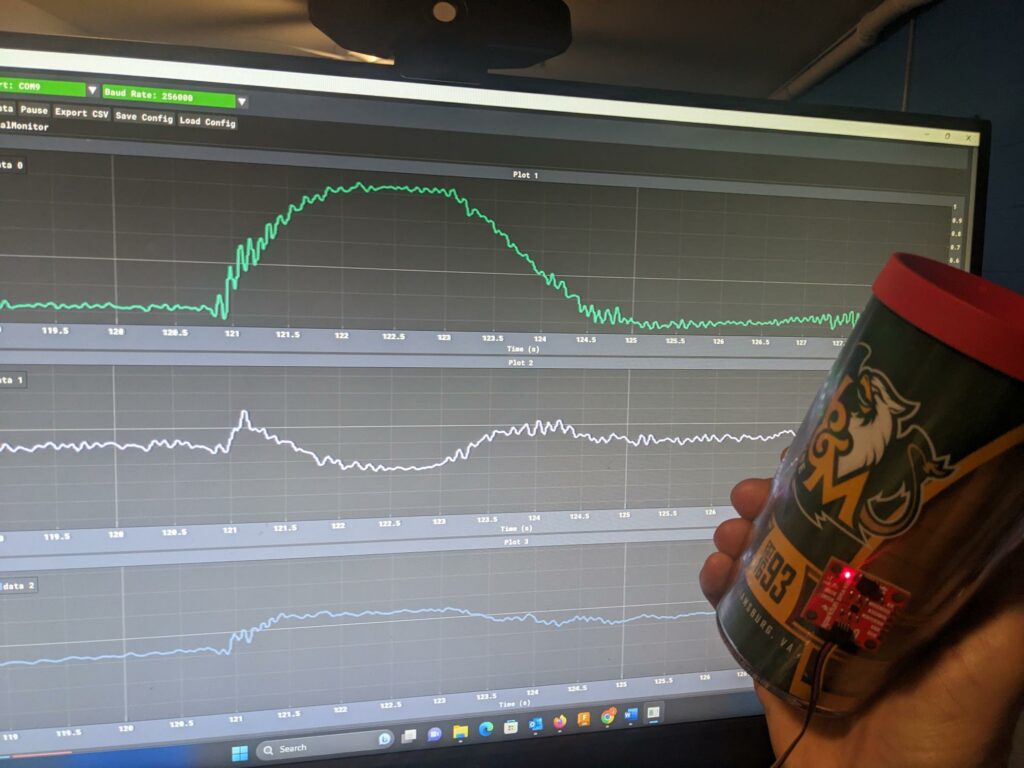
Working on a new course module for students to gain intuition about data in ‘Smart’ devices in APSC251 Intro to Engineering Design.
Testing the engraving capability on one of the LASERs in the Makerspaces at William & Mary
It has been quite the semester here in The Makerspaces. If you’ve been around, you’ve seen countless things get created, from the recent architectural adventures to working on concepts in autonomous boats, classwork involving 3D printed water pumps, custom solutions for research tools like the X-Ray Photoelectron Spectroscopy system at the Applied Research Center, working on setting up a 3D scanning lab, and hosting a sUAS pilot to discuss her roles at NASA.
There’s never a dull moment around here. As we head into the winter break you’ll still see some Makerspaces activity on campus, however, it is likely to be focused on maintenance & repair as well as gearing up for the spring semester.
After December 9th, feel free to stop by to make something by appointment only and with limited staff, additionally, stay tuned for the spring semester opening of our 3D scanning lab located adjacent-behind The Makerspaces at Swem Library wherein we’ll have multiple 3D scanning options for both small and large scales.
Good luck on Finals and we hope you have a wonderful holiday season and winter break! See you in the spring!
Welcome back everyone! While you were away, or hadn’t yet been here, we had quite a busy summer. Between fixing equipment, setting up new stuff, helping out with the School of Educations’ Camp Launch, or aiding in the construction of new UAV payloads for environmental sensing; the Makerspaces have been quite active. That said, we are over-the-moon excited to see all of the new faces rolling into Williamsburg ready for a great year!
The Makerspaces will officially open Wednesday, August 31st, alongside the start of classes. However, as we’re almost entirely run by (the best, most awesome-est) students; it will take a few days to get our scheduling setup and posted online.
If you’re new to using the Makerspaces, here’s the basic synopsis: Log into our ticketing system (see the ‘Make an Appt.’ tab above) and request training or usage and we’ll get back to you as soon as we can. Don’t worry about whether you know how to use something, we’re here to help.
Welcome back, now let’s get to work.
Setting up the environmental testing UAV on the docks at the Chickahominy Boathouse, Summer ’22
A near crash while flying in autonomous mapping mode with the environmental sampling UAV.9th Grade students in Camp Launch participated in a classic engineering challenge. Using LASER cutting systems to produce the parts themselves; they designed and constructed bridges that held over 100lbs using just 3mm acrylic (plastic)!
This past weekend was a great one if you like GIS, drones & books. The Center for Geospatial Analysis, the Virginia Institute for Marine Sciences, and the Makerspaces at William & Mary were at drone day at the Williamsburg Regional Library in Toana. It was a great day to engage with interested peoples of all ages, demonstrate larger scale UAVs such as those used in mapping coastline changes at VIMS, and get younger kids’ hands-on with small drones flying them through an obstacle course. If this sounds like fun, stay tuned for upcoming events with the CGA, VIMS, and the Makerspaces.
This past UAV flightclub day (every Friday morning, 8-11 @ Albert-Daly Field), some senior EPAD students working on their research project were gathering data for their autonomous water sampling payload. Shown in the video below, they are testing the flight characteristics of hanging a scaled down Niskin bottle with and without water. Once completed, and scaled up to our much larger UAV, this tool will be able help provide 1.1L water samples, autonomously, from the Chesapeake Bay watershed to scientists at VIMS and elsewhere.
If you’re interested in learning more about UAVs and getting some flight time in, feel free to stop by the field on Friday mornings! #FlightClub
Here in the Makerspaces, another project that’s in process is the creation of a robotic boat, or more specifically, the creation of swarming autonomous boats (unmanned surface vehicles (USVs) if we’re being real shoes-and-tie fancy like). As both a platform for learning as well as for research; autonomous unmanned surface vehicles are a very relevant technical environment within which our students are working. Swarming USVs will have deep applications in the future ranging from shipping and transportation to deep water exploration and more.
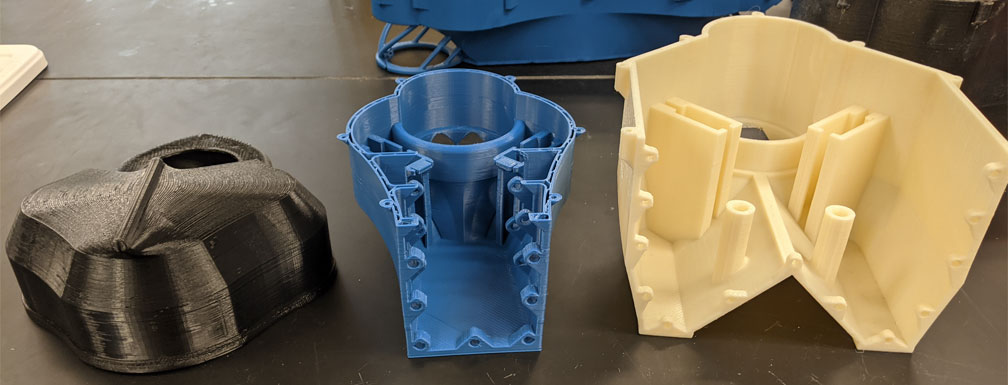
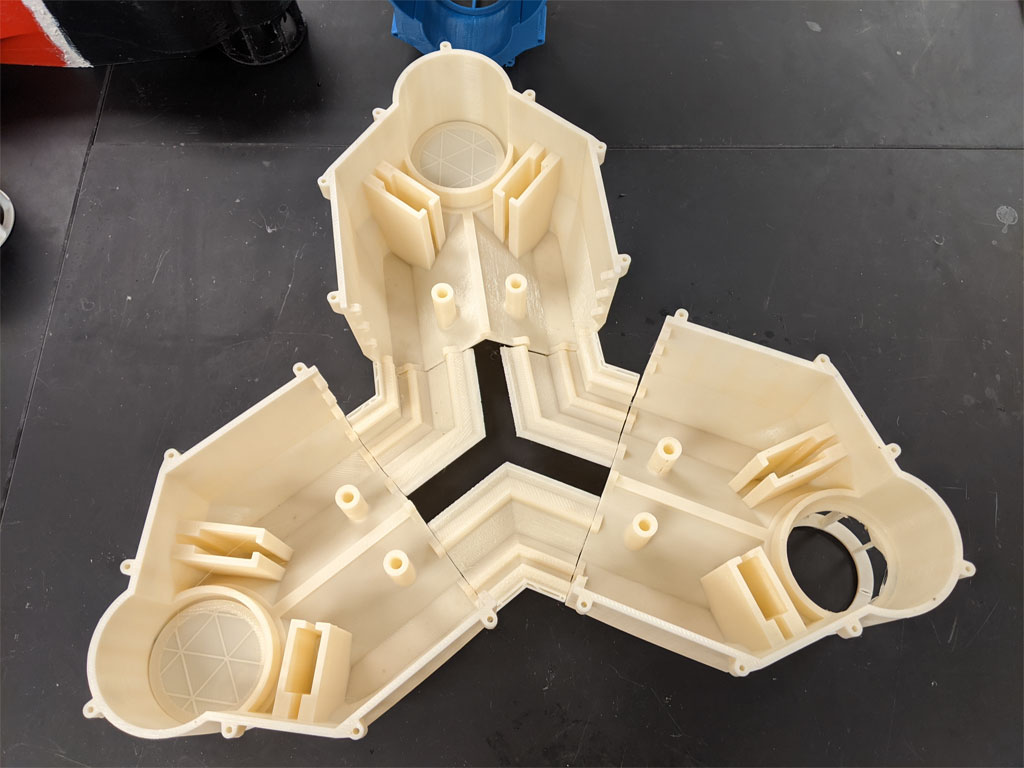
Starting small, our students are focusing on wholly 3D printed USV swarm member prototypes as shown below as we were preparing for a test launch from our Lake Matoaka docks back in January.
Over the past many months the students involved, in particular the Robotics Club, has explored hull design options and coding architectures on our way towards building an effective swarming USV member.
As can be seen these are clearly non-traditional boat hull designs. One of the big reasons that are so strange is that these USVs are based around a unique form of engine, Voith-Schneider propulsion (VSP) systems. VSP systems are quite unique in that they can almost instantaneously point a thrust vector in any cardinal direction. They look and operate similar to a helicopter blade that has been turned vertically and dunked into the water.
Using a simple RC system to test the VSP controlA view at the VSP control fins (surrounded by a protective cage)
If this project sounds of interest to you, let the Makerspaces or the student Robotics Club know and come join the fun. We’ve got all the basic building blocks working and are heading to the Lake for testing.
What’s better than robotics at Lake Matoaka on a nice sunny day?!
An early systems test checking that sensors and actuators are working on the prototype USV-1 design.