
 by
by Here in the Makerspaces, another project that’s in process is the creation of a robotic boat, or more specifically, the creation of swarming autonomous boats (unmanned surface vehicles (USVs) if we’re being real shoes-and-tie fancy like). As both a platform for learning as well as for research; autonomous unmanned surface vehicles are a very relevant technical environment within which our students are working. Swarming USVs will have deep applications in the future ranging from shipping and transportation to deep water exploration and more.
Starting small, our students are focusing on wholly 3D printed USV swarm member prototypes as shown below as we were preparing for a test launch from our Lake Matoaka docks back in January.

Over the past many months the students involved, in particular the Robotics Club, has explored hull design options and coding architectures on our way towards building an effective swarming USV member.
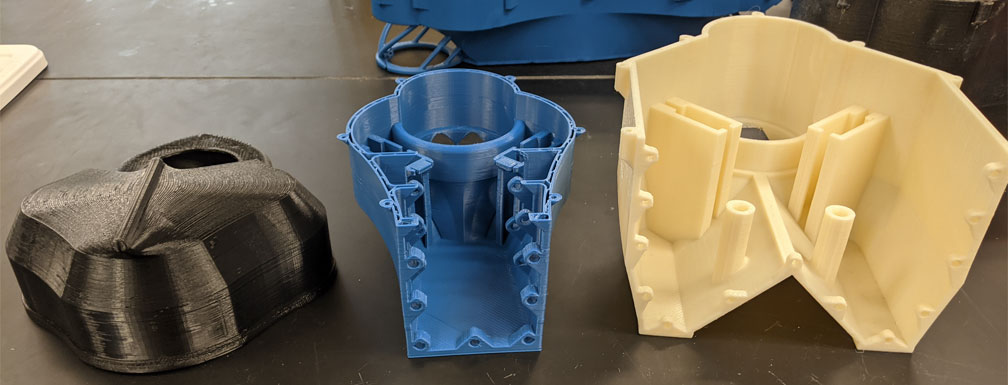
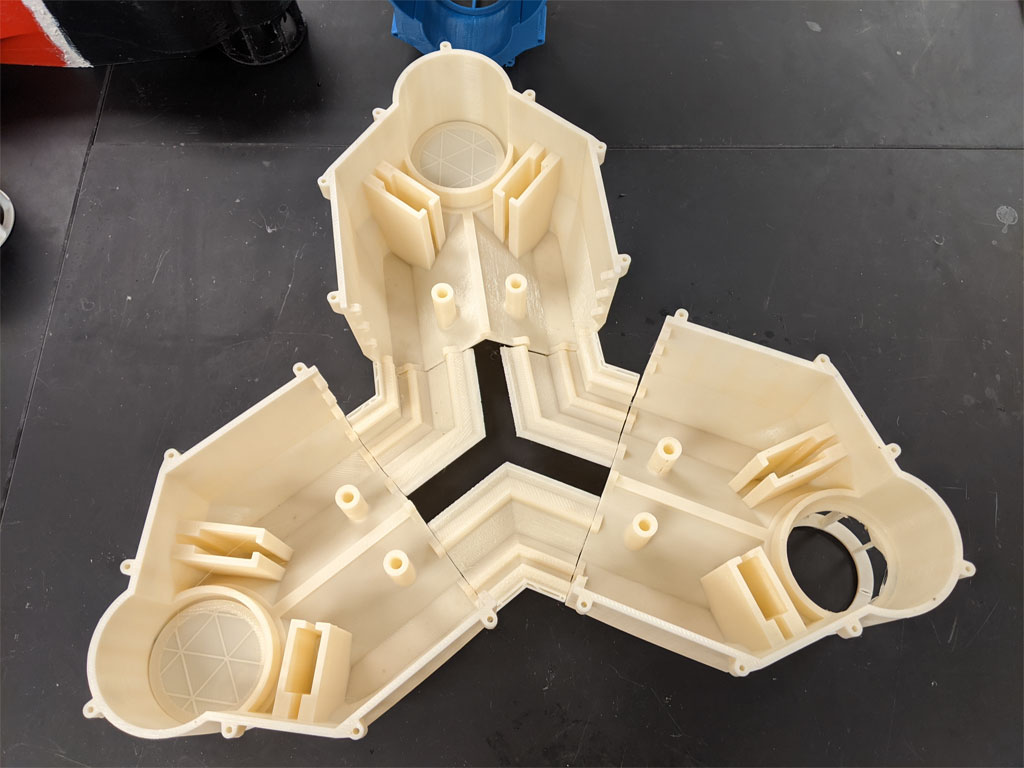
As can be seen these are clearly non-traditional boat hull designs. One of the big reasons that are so strange is that these USVs are based around a unique form of engine, Voith-Schneider propulsion (VSP) systems. VSP systems are quite unique in that they can almost instantaneously point a thrust vector in any cardinal direction. They look and operate similar to a helicopter blade that has been turned vertically and dunked into the water.

If this project sounds of interest to you, let the Makerspaces or the student Robotics Club know and come join the fun. We’ve got all the basic building blocks working and are heading to the Lake for testing.
What’s better than robotics at Lake Matoaka on a nice sunny day?!